PLC伺服工艺模块功能块封装
汇川,功能块封装
·
将PLC内伺服驱动工艺模块封装到FB中,后续其他项目都可使用,减少伺服工艺框架设计时间,提高编程效率
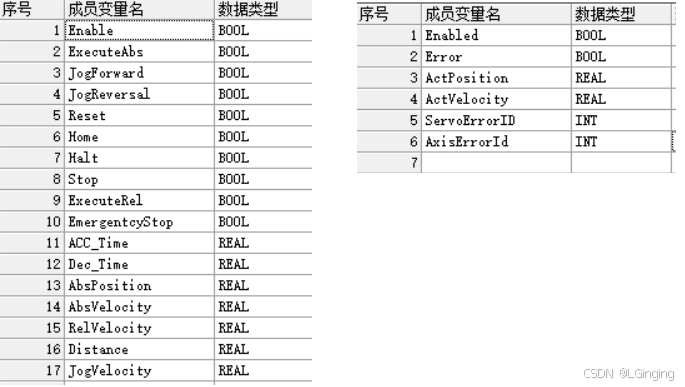
1,创建伺服驱动需要使用的Struct(需要两组,一组输入,一组输出)
2,创建封装使用的FB块(FC也可)
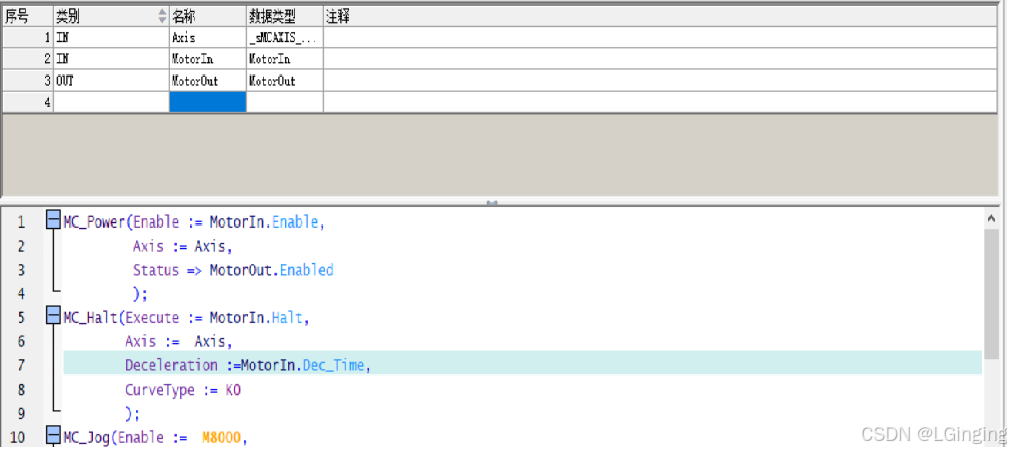
3,添加运动控制工艺指令
MC_Power(Enable := MotorIn.Enable,
Axis := Axis,
Status => MotorOut.Enabled
);
MC_Halt(Execute := MotorIn.Halt,
Axis := Axis,
Deceleration :=MotorIn.Dec_Time,
CurveType := K0
);
MC_Jog(Enable := M8000,
Axis := Axis,
JogForward := MotorIn.JogForward,
JogBackward := MotorIn.JogReversal,
Velocity := MotorIn.JogVelocity,
Acceleration := MotorIn.ACC_Time,
Deceleration := MotorIn.Dec_Time,
CurveType :=K0
);
MC_MoveAbsolute(Execute := MotorIn.ExecuteAbs,
Axis := Axis,
Position := MotorIn.AbsPosition,
Velocity := MotorIn.AbsVelocity,
Acceleration := MotorIn.ACC_Time,
Deceleration := MotorIn.Dec_Time,
CurveType := K0,
Direction :=K0 );
MC_MoveRelative(Execute := MotorIn.ExecuteRel,
Axis := Axis,
Distance := MotorIn.Distance,
Velocity := MotorIn.AbsVelocity,
Acceleration := MotorIn.ACC_Time,
Deceleration := MotorIn.Dec_Time,
CurveType := K0);
MC_Stop(Execute := MotorIn.Stop,
Axis := Axis,
Deceleration := MotorIn.Dec_Time,
CurveType :=K0 );
MC_Reset(Execute := MotorIn.Reset,
Axis := Axis);
MC_ReadAxisError(Enable := M8000,
Axis := Axis,
ServoErrorID => MotorOut.ServoErrorID,
AxisErrorID => MotorOut.AxisErrorId,
Error => MotorOut.Error);
MC_ReadActualPosition(Enable := m8000,
Axis := Axis,
Position => MotorOut.ActPosition);
MC_ReadActualVelocity(Enable := M8000,
Axis := Axis,
Velocity =>MotorOut.ActVelocity);
可根据使用需要自行添加。。。。
4.调用功能块
Motors(Axis := X_S1,MotorIn := ::X_ServerIN,MotorOut =>::X_ServerOUT );添加相关参数即可!
功能块封装与使用就完成了,此PLC使用的是汇川521系列

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)