(一篇入门)汽车电子电器 之 电机MCU控制器 四
电机控制器是电动汽车电驱动系统的核心部件,负责精确控制电机扭矩输出。它采用FOC、SVPWM等先进算法实现高性能控制,具备ASIL-D级安全保护机制,包括实时信号监控、多级故障处理和硬件冗余设计。控制器通过CAN总线与整车系统交互,完成能量管理、热管理等功能。开发过程遵循ASPICE和ISO26262标准,采用V模式开发流程,涵盖MIL/SIL仿真、HIL测试和实车验证等环节。测试重点包括扭矩响应
整车架构

第一部分:电机MCU(控制器)深度功能解析
电机控制器(常被误称为MCU,但MCU特指其中的微控制器芯片)是电驱动系统的“神经中枢和执行力”。其功能远不止简单的逆变。
1、核心控制功能
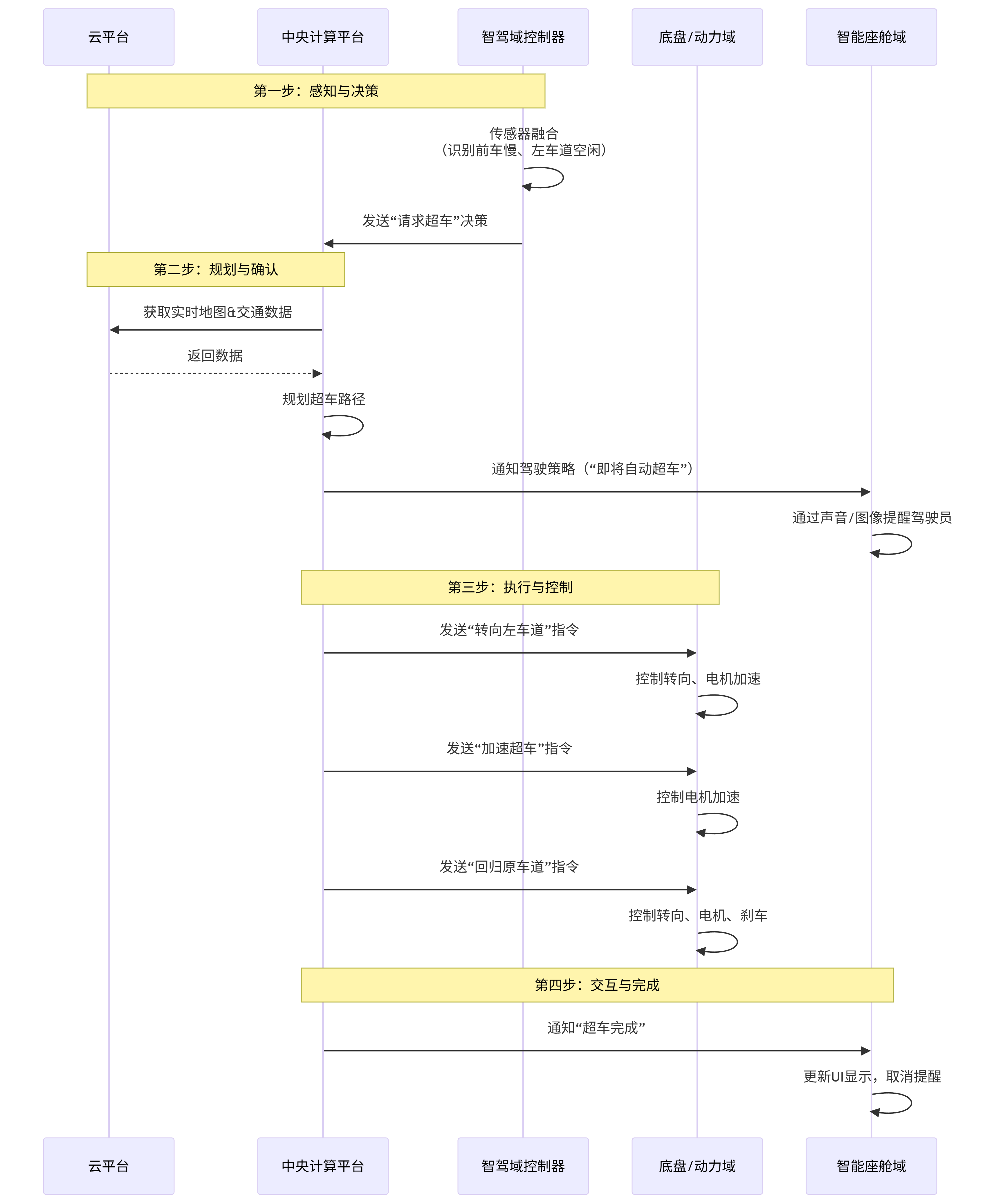
高精度扭矩控制:接收VCU的扭矩指令(通常为CAN信号,如 0x2E0 ID中的 Torque_Request 信号),通过闭环控制算法(如下述的FOC),实现毫秒级响应和±1%以内的扭矩控制精度。这是驾驶平顺性和响应性的根本。
先进算法执行:
FOC (磁场定向控制):行业标准。将三相交流电分解为产生磁场的励磁电流(Id)和产生转矩的转矩电流(Iq),分别进行精确控制。从而实现电机的高效率、高动态响应和低速大扭矩。
SVPWM (空间矢量脉宽调制):一种优化的PWM生成技术,相比传统SPWM,直流母线电压利用率提高约15%,开关损耗更低。
MTPA (最大转矩电流比控制):在永磁同步电机中,优化Id和Iq的分配,使得在输出特定转矩时,定子电流最小,从而降低铜耗,提升效率。
弱磁控制:当电机转速超过基速时,通过注入反向的d轴电流来削弱电机永磁场,从而实现更高转速的运行。
2、复杂的诊断与保护功能 (ASIL-D级别)
实时信号监控:以控制循环频率(通常10-20kHz)对以下关键参数进行采样和校验:
电流:三相电流(用于FOC)、直流母线电流(用于保护)。
电压:直流母线电压(用于算法和保护)、12V电源电压(用于逻辑电路监控)。
温度:IGBT结温(通过NTC热敏电阻或模型估算)、电机绕组温度、冷却液温度。
位置/速度:解析器或编码器信号的可靠性和合理性。
故障分级处理:不同等级的故障采取不同措施。
|
故障等级 |
处理措施 |
示例 |
|
一级 |
立即安全关断 |
硬件过流、短路、IGBT短路、严重超速 |
|
二级 |
降功率运行并报警 |
一般过温、电流/电压超限、解析器信号轻微异常 |
|
三级 |
限制功能并提示 |
冷却液温度偏高、效率降低 |
功能安全机制:为实现ISO 26262 ASIL-D,内置多重安全机制:
CPU锁步核 (Lockstep Core):两个物理核心执行相同代码,实时比较结果,防止随机硬件故障。
ECC/奇偶校验:对内存、Flash、总线数据进行错误检查和纠正。
看门狗:独立看门狗(IWDG)和窗口看门狗(WWDG)监控程序运行流。
电源监控:监控各供电轨的电压是否在正常范围。
安全关断路径:即使MCU芯片失效,也能通过外部专用监控芯片(如CIC61508)强制关断PWM输出。
管理与通信功能
Bootloader:支持通过CAN/CAN FD或以太网进行可靠的、带校验和 rollback(回滚)功能的固件刷写(FOTA)。
能量管理:与BMS协同,根据电池SOC、温度、健康状态(SOH)实时计算并限制放电/回馈充电功率。
热管理:根据温度模型和冷却液流量,动态调整开关频率(降低频率可减少开关损耗)和输出功率,防止过热。
第二部分:内部功能模块架构深度剖析
下图展示了一个高度集化的电机控制器内部架构,特别是主控芯片(MCU)内部的详细功能模块。
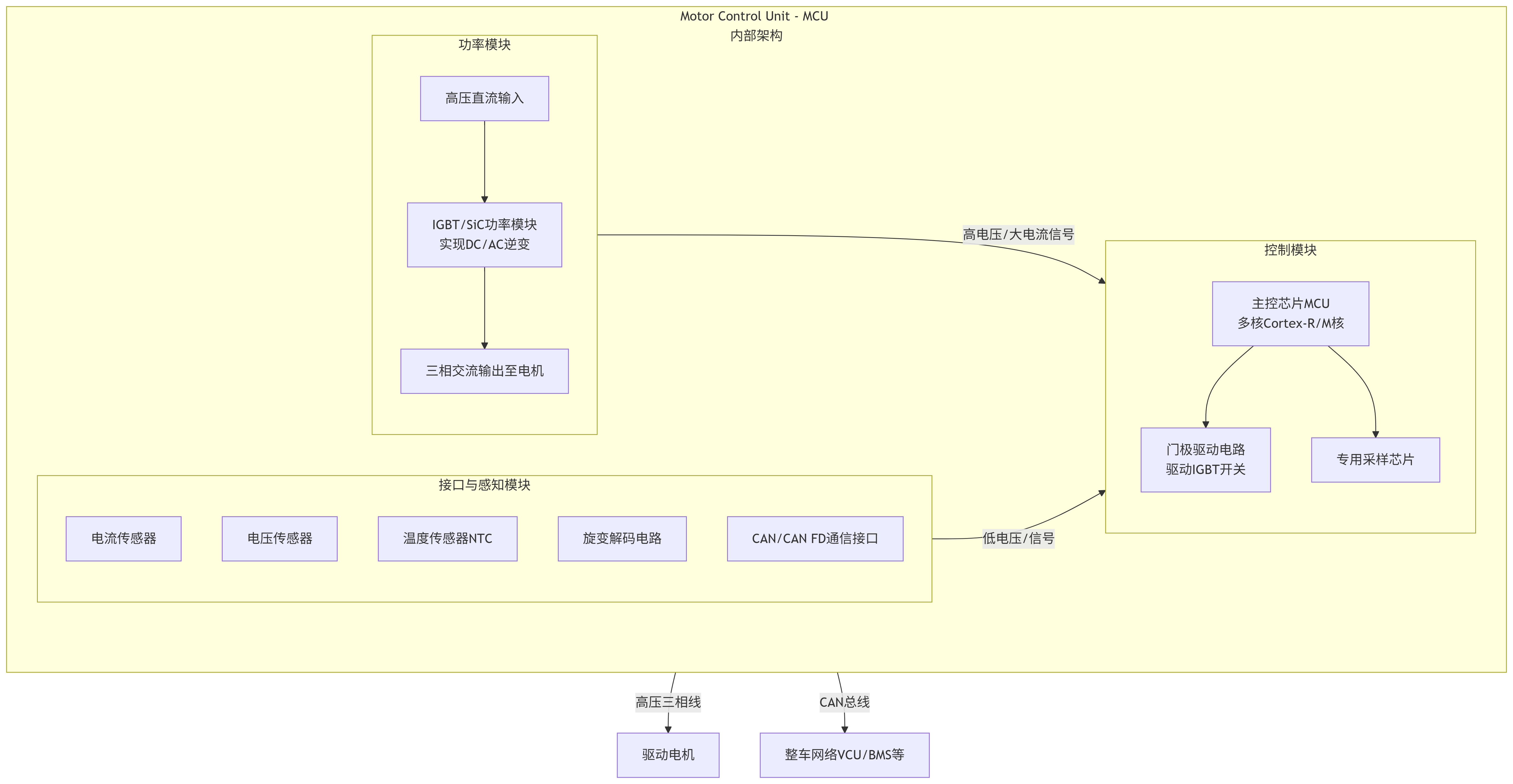
关键模块深度解读:
主控MCU芯片:如Infineon Aurix TC3xx系列、NXP S32K3xx系列、TI C2000系列。它们不仅是计算核心,更集成了大量专用外设。
GTM (Generic Timer Module):一个非常强大的定时器协处理器,可以独立处理编码器信号解码、PWM模式生成、信号触发等复杂任务,极大减轻CPU负载。
ePWM:增强型PWM模块,每个通道可独立配置死区时间、故障急停响应、高精度占空比控制,是驱动功率开关的核心。
ADC:高采样率(>1MSPS)、多通道的ADC,通常与PWM同步触发,实现精确的采样时刻控制。
栅极驱动芯片:如Infineon EiceDRIVER™。它接收MCU发出的低压PWM信号,将其放大到足以驱动IGBT/SiC栅极的电压(通常+15V/-8V)。它自身也集成短路保护(DESAT)、欠压锁定(UVLO)、米勒钳位等关键保护功能。
隔离:在低压和高压之间必须进行电流隔离和电压隔离。常用光耦、电容隔离或磁隔离芯片对PWM信号和故障信号进行隔离。电流和电压采样则使用隔离运放(如AMC1301)或数字隔离器。
第三部分:交互信号深度列表(CAN矩阵示例)
以下是一个更接近实际项目的CAN信号交互表格,假设使用CAN FD(更高带宽)。
|
ECU |
CANID |
信号名 |
长度 |
值/单位 |
描述 |
周期 |
|
VCU → MCU |
0x2E0 |
Veh_Spd |
16 bit |
0.01 km/h |
车辆实际车速 |
10 ms |
|
Trq_Req |
16 bit |
0.5 Nm/bit, -600~600 Nm |
总扭矩请求(驱动+) |
10 ms |
||
|
Gear_Pos |
4 bit |
0-P, 1-R, 2-N, 3-D |
档位请求 |
50 ms |
||
|
0x2E1 |
Brk_Pedal_Pos |
8 bit |
0.5 % |
制动踏板开度 |
10 ms |
|
|
MCU → VCU |
0x3A0 |
MCU_ActTrq |
16 bit |
0.5 Nm/bit |
电机实际输出扭矩 |
10 ms |
|
MCU_Spd |
16 bit |
1 RPM/bit |
电机转速 |
10 ms |
||
|
MCU_Status |
8 bit |
0-Init, 1-Ready, ... |
MCU状态机 |
50 ms |
||
|
0x3A1 |
MCU_ErrLvl |
4 bit |
0-NoErr, 1-Warn, 2-Derate, 3-Fault |
故障等级 |
10 ms |
|
|
MCU_DiagCode |
16 bit |
- |
标准故障码(UDS) |
事件触发 |
||
|
BMS → MCU |
0x6B0 |
BMS_Voltage |
16 bit |
0.1 V |
电池总电压 |
100 ms |
|
BMS_SOC |
8 bit |
0.5 % |
电池荷电状态 |
1 s |
||
|
BMS_ChgLimCurr |
16 bit |
0.1 A/bit |
最大允许充电电流(回馈) |
100 ms |
||
|
BMS_DischgLimCurr |
16 bit |
0.1 A/bit |
最大允许放电电流 |
100 ms |
||
|
MCU → BMS |
0x7C0 |
MCU_ChgCurrReq |
16 bit |
0.1 A/bit |
能量回收请求电流 |
50 ms |
|
MCU_DCVoltage |
16 bit |
0.1 V |
直流母线实际电压 |
50 ms |
第四部分:测试场景与实车测试深度详解
1. V流程中的测试体系
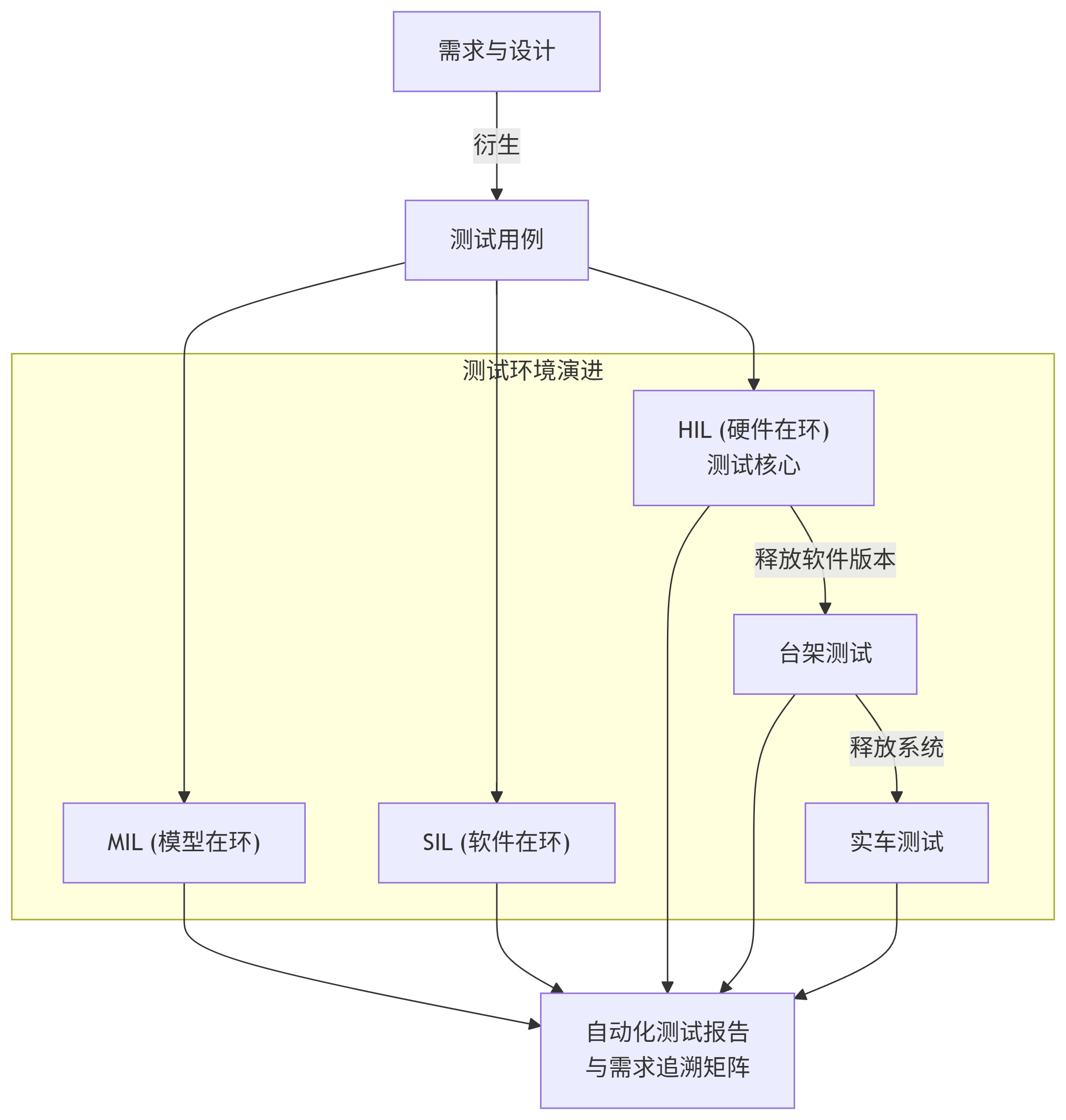
MIL/SIL:在PC上仿真测试控制模型和生成代码的逻辑正确性。
HIL:测试的核心环节。使用dSPACE、NI、恒润等实时仿真器,模拟整车环境(模拟VCU、BMS的CAN报文)、高保真电机模型(模拟PMSM/IM的电磁特性)、故障注入(如短路传感器线束)、极限工况(如极寒极热)、ECU网络管理等。HIL测试覆盖率可达70%以上。
2. 实车测试深度用例与方法
|
测试大项 |
测试子项 |
测试目的 |
详细测试方法与数据采集 |
|
功能与性能 |
扭矩响应与精度 |
验证从VCU发出指令到电机产生扭矩的延迟时间和稳态精度。 |
工具: 带CAN卡的PC、高精度电流钳、扭矩法兰。 |
|
全工况MAP测试 |
绘制电机系统在整个转速-扭矩范围内的效率MAP图。 |
工具: 测功机台架、功率分析仪。 |
|
|
故障与安全 |
故障注入测试 |
验证所有诊断和保护功能在实车环境下是否按预期工作。 |
方法: 在真实线束上使用故障注入单元(如NI FTB)或手动模拟故障。 |
|
跛行回家功能 |
验证在关键传感器(如解析器)失效后,能否依靠估计算法维持极低限速行驶。 |
方法: 在车辆低速行驶时,拔掉解析器接头。驾驶员应能感到动力中断一下后,车辆以极低速度(如5km/h)继续行驶,并能开到安全区域。 |
|
|
NVH |
阶次分析 |
定位并解决特定转速下的噪声与振动问题。 |
工具: LMS/Head数据采集系统、加速度计、麦克风。 |
|
耐久与可靠性 |
道路耐久试验 |
在真实道路环境中考核控制器的长期可靠性。 |
方法: 覆盖各种极端路况(强化坏路、高速环道、高原、高温、高寒地区)。连续长时间运行,监控控制器状态。试验后拆解检查IGBT焊层裂纹、电容容值衰减等。 |
第五部分:开发与测试流程(ASPICE & ISO 26262)
这是一个符合汽车行业标准的严格流程。
概念阶段:定义系统边界、功能、安全目标(ASIL等级)、初步架构。
系统开发:
系统需求:编写《系统需求规格说明书》(SyRS)。
系统架构:编写《系统架构设计文档》(SAD),定义硬件/软件接口(HSI)。
软硬件开发:
软件:基于需求编写《软件需求规格说明书》(SRS)。采用MBD方式进行软件架构设计、模型实现、自动代码生成。同时编写手写代码(底层驱动、通信栈等)。
硬件:根据需求进行原理图设计、PCB Layout、DFMEA(失效模式分析)、热仿真、结构仿真。
测试与验证(与开发并行的V模型右端):
软件单元测试:对模型和代码进行100%模型覆盖率(MC/DC)测试。
软件集成测试:测试软件组件间的交互。
硬件测试:EVT/DVT/PVT各阶段的硬件测试,包括功能、性能、环境(振动、冲击、温湿度)、EMC(辐射/传导发射、抗扰度)。
系统集成与测试:在HIL台架上进行系统测试,追溯所有系统需求。
车辆验收测试:实车测试,作为最终的用户验收。
生产发布:完成PPAP(生产件批准程序),获得SOP放行许可。

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐

 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)