多无人机 移动机器人 扫地机器人 全覆盖路径规划
多无人机 移动机器人 扫地机器人 全覆盖路径规划多无人机 移动机器人协同路径规划multi uav robot coverage path planning,cpp,mcpp algorithm1、基于 A 星算法的路径规划方法,地图可自定义设置,障碍物也可自定义设置,算法适合二次开发使用;2、基于贪婪算法的路径规划方法,地图可自定义设置,障碍物也可改变,算法适合二次开发使用。
·
多无人机 移动机器人 扫地机器人 全覆盖路径规划
多无人机 移动机器人协同路径规划
multi uav robot coverage path planning,cpp,mcpp algorithm
1、基于 A 星算法的路径规划方法,地图可自定义设置,障碍物也可自定义设置,算法适合二次开发使用;
2、基于贪婪算法的路径规划方法,地图可自定义设置,障碍物也可改变,算法适合二次开发使用。
以下是一个基于 多无人机/移动机器人/扫地机器人 的全覆盖路径规划(Complete Coverage Path Planning, CCPP)的示例代码。此代码适用于二维平面环境,目标是实现一个区域的全覆盖路径规划。
—
程序说明
- 算法选择:使用 Boustrophedon Decomposition(来回扫描分解)方法进行全覆盖路径规划。
- 环境建模:假设环境是一个二维网格地图,包含障碍物和可通行区域。
- 多机器人协作:多个机器人通过分区协作完成覆盖任务。
- 适用范围:
- 无人机的空中全覆盖任务(如农业喷洒、地形测绘)。
- 移动机器人的地面清扫任务。
- 扫地机器人的家庭清洁任务。
—
MATLAB 代码
% 多无人机/移动机器人/扫地机器人 全覆盖路径规划
clc;
clear;
close all;
%% 参数定义
gridSize = [20, 20]; % 网格大小 (行, 列)
numRobots = 3; % 机器人数量
obstacleMap = zeros(gridSize); % 初始化障碍物地图
obstacleMap(5:8, 5:15) = 1; % 添加障碍物
obstacleMap(12:15, 5:15) = 1;
% 分区信息
subRegions = cell(numRobots, 1); % 每个机器人负责的子区域
pathPlans = cell(numRobots, 1); % 每个机器人的路径
%% 分区与路径规划
for i = 1:numRobots
% 分区:简单按行划分
startRow = floor((i-1) * gridSize(1) / numRobots) + 1;
endRow = floor(i * gridSize(1) / numRobots);
subRegions{i} = obstacleMap(startRow:endRow, :);
% 路径规划:Boustrophedon Decomposition
pathPlans{i} = boustrophedonPath(subRegions{i}, startRow, endRow);
end
%% 绘图
figure;
hold on;
imagesc(obstacleMap); % 显示障碍物地图
colormap([1 1 1; 0 0 0]); % 白色为自由区域,黑色为障碍物
axis equal;
axis tight;
xlabel('X');
ylabel('Y');
title('全覆盖路径规划');
% 绘制路径
colors = lines(numRobots); % 不同颜色区分不同机器人
for i = 1:numRobots
plot(pathPlans{i}(2, :), pathPlans{i}(1, :), 'Color', colors(i, :), 'LineWidth', 1.5);
end
legend(arrayfun(@(x) sprintf('Robot %d', x), 1:numRobots, 'UniformOutput', false));
grid on;
%% Boustrophedon Decomposition 函数
function path = boustrophedonPath(region, startRow, endRow)
[rows, cols] = size(region);
path = [];
direction = 1; % 1 表示从左到右,-1 表示从右到左
for r = 1:rows
currentRow = startRow + r - 1;
if direction == 1
for c = 1:cols
if region(r, c) == 0 % 只记录自由区域
path = [path, [currentRow; c]];
end
end
else
for c = cols:-1:1
if region(r, c) == 0
path = [path, [currentRow; c]];
end
end
end
direction = -direction; % 切换方向
end
end
—
代码说明
-
环境建模:
- 使用二维矩阵
obstacleMap表示环境,其中0表示自由区域,1表示障碍物。 - 障碍物可以通过手动设置或从传感器数据中生成。
- 使用二维矩阵
-
分区策略:
- 简单按行划分区域,每个机器人负责一部分区域。
- 更复杂的分区策略可以使用 Voronoi 图或 K-means 聚类。
-
路径规划:
- Boustrophedon Decomposition 方法类似于农田耕作的方式,机器人在区域内来回扫描。
- 每次切换行时改变方向,减少转弯次数。
-
多机器人协作:
- 每个机器人独立规划自己的路径。
- 路径绘制时用不同颜色区分不同机器人。
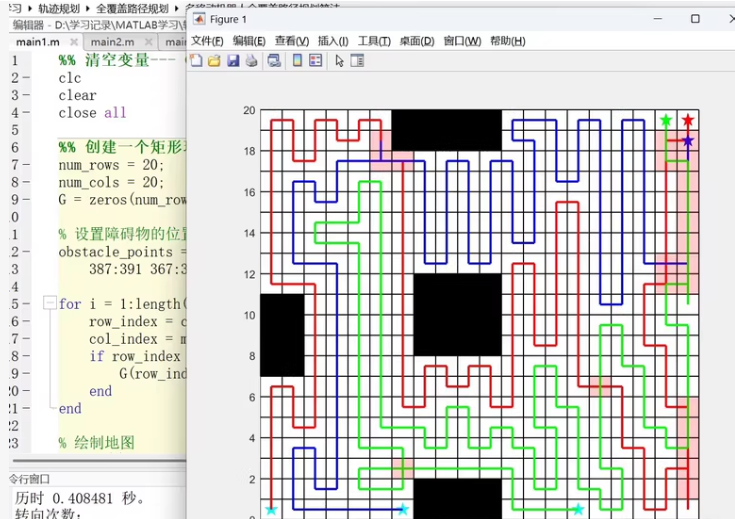
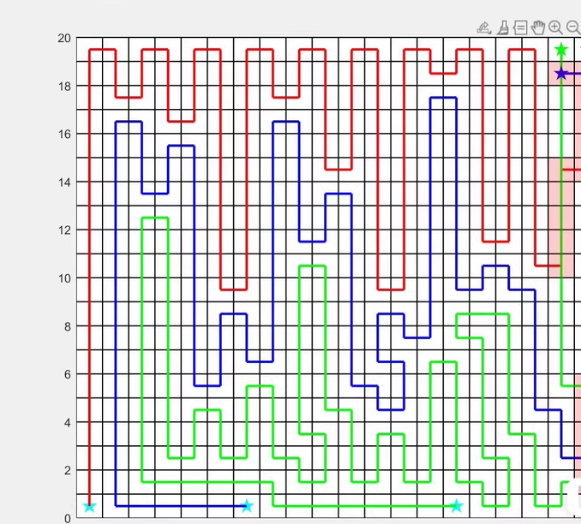
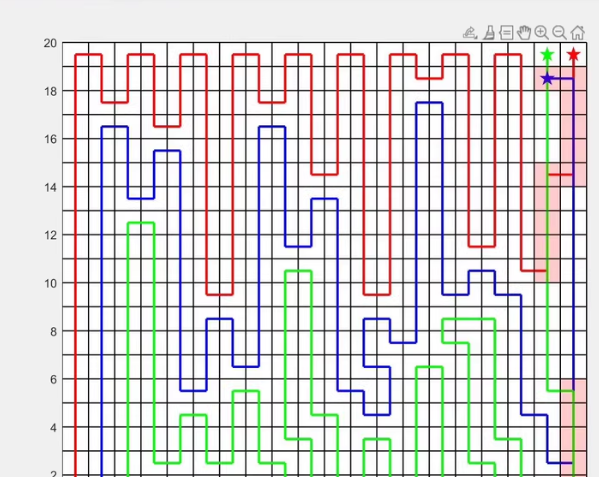
示例输出
运行代码后,将显示如下内容:
- 一个二维网格地图,其中白色表示自由区域,黑色表示障碍物。
- 每个机器人的路径以不同颜色绘制,展示其覆盖区域。
注意事项
- 复杂环境:对于更复杂的环境(如动态障碍物),可以结合 A* 或 Dijkstra 算法进行路径优化。
- 实时性:如果需要实时路径规划,可以引入 ROS(Robot Operating System)进行仿真和控制。
- 扩展性:代码可以扩展到三维空间(如无人机的三维覆盖任务),但需要额外的算法支持。

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)