零阶保持模型和一阶保持模型离散的推导
鲁 鹏,北京理工大学宇航学院为了将离散信号重新转换成连续信号,常使用零阶保持 (zero-order hold, ZOH) 模型或一阶保持 (first order hold) 模型 。本文将推导线性系统零阶保持器和一阶保持器离散定义矩阵的指数函数为eA=exp(A)=I+A+A22!+A33!+⋯=∑n=0∞Ann!(1)e^{A} = \exp(A) = I+A+\frac{A^2}{2!}
鲁 鹏,北京理工大学宇航学院
为了将离散信号重新转换成连续信号,常使用零阶保持 (zero-order hold, ZOH) 模型或一阶保持 (first order hold) 模型 。本文将推导线性系统零阶保持器和一阶保持器离散公式
定义矩阵的指数函数为
e A = exp ( A ) = I + A + A 2 2 ! + A 3 3 ! + ⋯ = ∑ n = 0 ∞ A n n ! (1) e^{A} = \exp(A) = I+A+\frac{A^2}{2!} + \frac{A^3}{3!} + \cdots = \sum_{n=0}^{\infty}\frac{A^n}{n!} \tag{1} eA=exp(A)=I+A+2!A2+3!A3+⋯=n=0∑∞n!An(1)
任意的方阵 A 均可以转换为 Jordan 标准型(矩阵论里的知识),即 A = P J P − 1 A = PJP^{-1} A=PJP−1 ,并且 Jordan 标准型的幂可以轻松求解。此时再求 A n = P J n P − 1 A^{n} = PJ^{n}P^{-1} An=PJnP−1 就很好求了。
我们考虑如下线性系统
x ˙ ( t ) = A ( t ) x ( t ) + B ( t ) u ( t ) + Σ ( t ) σ + z ( t ) (2) \dot{\boldsymbol{x}}(t) = A(t) \boldsymbol{x}(t) + B(t) \boldsymbol{u}(t) + \Sigma(t)\sigma + \boldsymbol{z}(t) \tag{2} x˙(t)=A(t)x(t)+B(t)u(t)+Σ(t)σ+z(t)(2)
其中, x ( t ) ∈ R n \boldsymbol{x}(t)\in\mathbb{R}^{n} x(t)∈Rn 是状态向量, u ( t ) ∈ R m \boldsymbol{u}(t)\in\mathbb{R}^{m} u(t)∈Rm 是控制向量, σ ∈ R \sigma\in\mathbb{R} σ∈R 是参数, A ( t ) ∈ R n × n A(t)\in\mathbb{R}^{n\times n} A(t)∈Rn×n是状态矩阵, B ( t ) ∈ R n × m B(t)\in\mathbb{R}^{n\times m} B(t)∈Rn×m是控制矩阵, Σ ( t ) ∈ R n \Sigma(t)\in\mathbb{R}^{n} Σ(t)∈Rn是参数矩阵, z ( t ) ∈ R n \boldsymbol{z}(t)\in\mathbb{R}^{n} z(t)∈Rn是扰动。该系统的状态转移矩阵可以参考[1]
状态转移矩阵 Φ ( t , t 0 ) \Phi(t,t_{0}) Φ(t,t0)的性质 [3]

使用以上性质可以推导出线性系统 (2) 的解
x ˙ ( t ) − A ( t ) x ( t ) = B ( t ) u ( t ) + Σ ( t ) σ + z ( t ) Φ − 1 ( t , t k ) x ˙ ( t ) − Φ − 1 ( t , t k ) A ( t ) x ( t ) = Φ − 1 ( t , t k ) [ B ( t ) u ( t ) + Σ ( t ) σ + z ( t ) ] d d t [ Φ − 1 ( t , t k ) x ( t ) ] = Φ − 1 ( t , t k ) [ B ( t ) u ( t ) + Σ ( t ) σ + z ( t ) ] Φ − 1 ( t , t k ) x ( t ) − Φ − 1 ( t k , t k ) x ( t k ) = ∫ t k t Φ − 1 ( ξ , t k ) [ B ( ξ ) u ( ξ ) + Σ ( ξ ) σ + z ( ξ ) ] d ξ x ( t ) = Φ ( t , t k ) x ( t k ) + Φ ( t , t k ) ∫ t k t Φ − 1 ( ξ , t k ) [ B ( ξ ) u ( ξ ) + Σ ( ξ ) σ + z ( ξ ) ] d ξ \dot{x}(t) - A(t) x(t) = B(t) u(t) + \Sigma(t)\sigma + z(t) \\ \Phi^{-1}(t,t_{k}) \dot{x}(t) - \Phi^{-1}(t,t_{k}) A(t) x(t) = \Phi^{-1}(t,t_{k})\left[B(t) u(t) + \Sigma(t)\sigma + z(t)\right] \\ \frac{d}{dt}\left[\Phi^{-1}(t,t_{k}) x(t)\right] = \Phi^{-1}(t,t_{k})\left[B(t) u(t) + \Sigma(t)\sigma + z(t)\right] \\ \Phi^{-1}(t,t_{k}) x(t) - \Phi^{-1}(t_{k},t_{k}) x(t_{k}) = \int_{t_{k}}^{t}\Phi^{-1}(\xi,t_{k})\left[B(\xi) u(\xi) + \Sigma(\xi)\sigma + z(\xi)\right]d\xi \\ x(t) = \Phi(t,t_{k}) x(t_{k}) + \Phi(t,t_{k})\int_{t_{k}}^{t}\Phi^{-1}(\xi,t_{k})\left[B(\xi) u(\xi) + \Sigma(\xi)\sigma + z(\xi)\right]d\xi \\ x˙(t)−A(t)x(t)=B(t)u(t)+Σ(t)σ+z(t)Φ−1(t,tk)x˙(t)−Φ−1(t,tk)A(t)x(t)=Φ−1(t,tk)[B(t)u(t)+Σ(t)σ+z(t)]dtd[Φ−1(t,tk)x(t)]=Φ−1(t,tk)[B(t)u(t)+Σ(t)σ+z(t)]Φ−1(t,tk)x(t)−Φ−1(tk,tk)x(tk)=∫tktΦ−1(ξ,tk)[B(ξ)u(ξ)+Σ(ξ)σ+z(ξ)]dξx(t)=Φ(t,tk)x(tk)+Φ(t,tk)∫tktΦ−1(ξ,tk)[B(ξ)u(ξ)+Σ(ξ)σ+z(ξ)]dξ
x ( t ) = Φ ( t , t k ) x ( t k ) + ∫ t k t Φ ( t , ξ ) [ B ( ξ ) u ( ξ ) + Σ ( ξ ) σ + z ( ξ ) ] d ξ (3) x(t) = \Phi(t,t_{k}) x(t_{k}) + \int_{t_{k}}^{t}\Phi(t,\xi)\left[B(\xi) u(\xi) + \Sigma(\xi)\sigma + z(\xi)\right]d\xi \tag{3} x(t)=Φ(t,tk)x(tk)+∫tktΦ(t,ξ)[B(ξ)u(ξ)+Σ(ξ)σ+z(ξ)]dξ(3)
零阶保持模型
使用零阶保持模型离散时,控制量在采样时刻之间保持不变,即
u ( t ) = u ( t k ) , ∀ t ∈ [ t k , t k + 1 ) (4) \boldsymbol{u}(t) = \boldsymbol{u}(t_{k}), \forall t\in [t_{k},t_{k+1}) \tag{4} u(t)=u(tk),∀t∈[tk,tk+1)(4)
t k , t k + 1 t_{k}, t_{k+1} tk,tk+1是时间离散点。
当控制有上面 (4) 的形式时,公式 (3) 可以简化为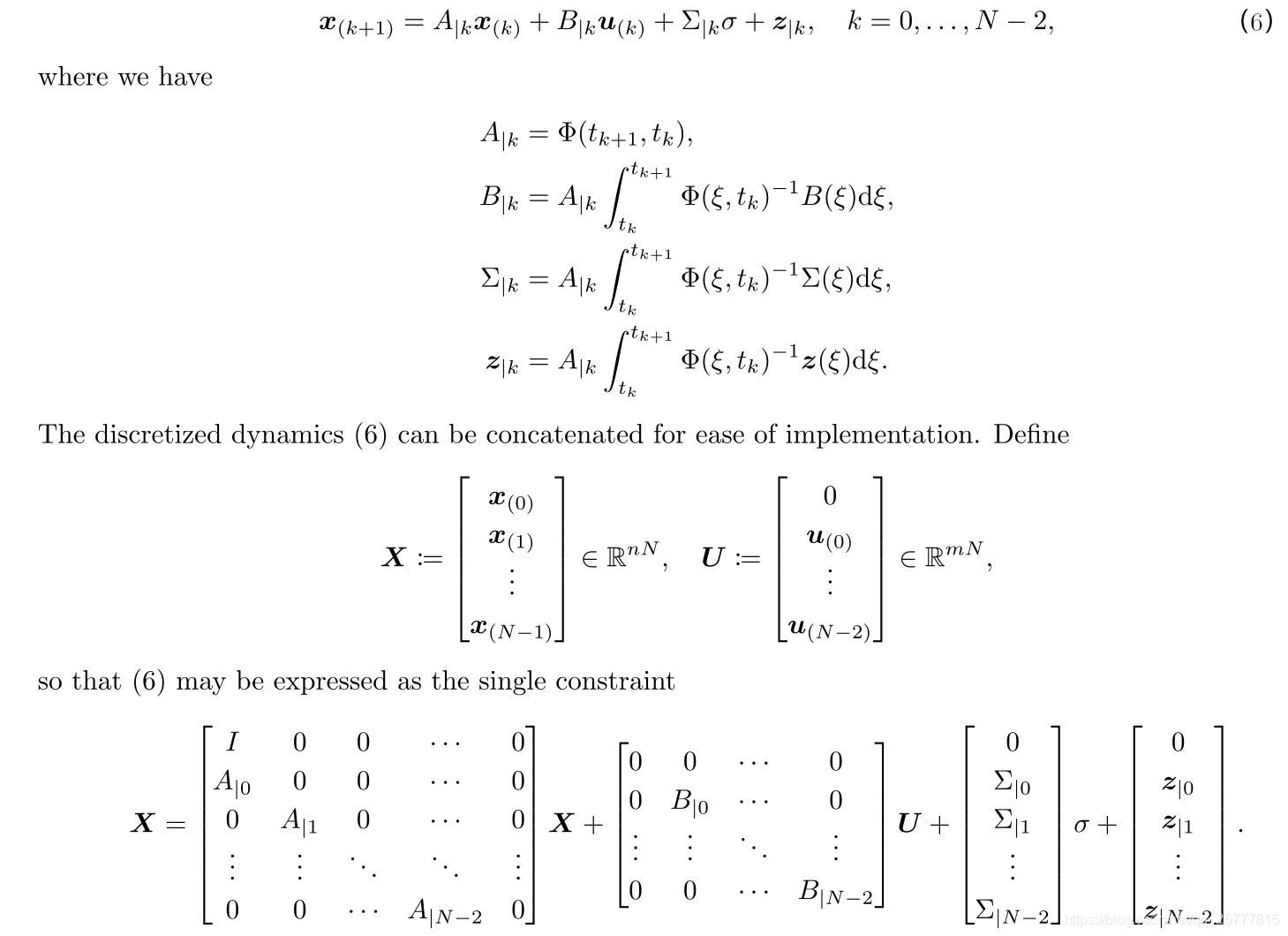
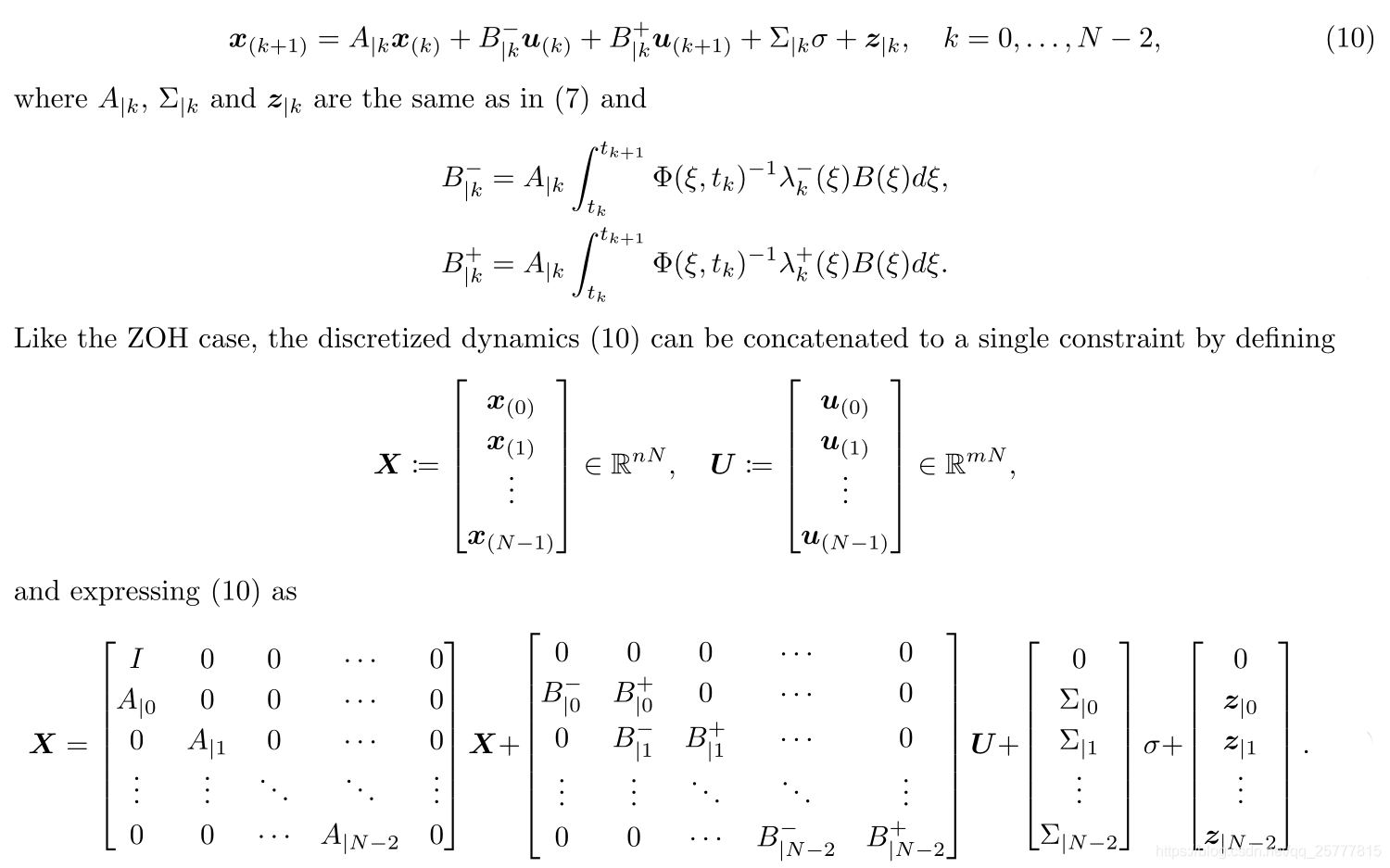
一阶保持模型
使用一阶保持模型离散时,控制量在采样时刻之间线性变化,即
u ( t ) = λ k − ( t ) u ( t k ) + λ k + ( t ) u ( t k + 1 ) , ∀ t ∈ [ t k , t k + 1 ) λ k − ( t ) ≜ t k + 1 − t t t + 1 − t k λ k + ( t ) ≜ t − t k t t + 1 − t k (5) \boldsymbol{u}(t) = \lambda_{k}^{-}(t)\boldsymbol{u}(t_{k})+\lambda_{k}^{+}(t)\boldsymbol{u}(t_{k+1}), \forall t\in [t_{k},t_{k+1}) \tag{5} \\ \lambda_{k}^{-}(t) \triangleq \frac{t_{k+1}-t}{t_{t+1}-t_{k}} \\ \lambda_{k}^{+}(t) \triangleq \frac{t-t_{k}}{t_{t+1}-t_{k}} u(t)=λk−(t)u(tk)+λk+(t)u(tk+1),∀t∈[tk,tk+1)λk−(t)≜tt+1−tktk+1−tλk+(t)≜tt+1−tkt−tk(5)
当控制有上面 (5) 的形式时,公式 (3) 可以简化为
参考:
[1] https://blog.csdn.net/qq_25777815/article/details/102509131
[2] https://dsp.stackexchange.com/questions/59725/derivation-of-zoh-discretization
[3] Danylo Malyuta, Taylor Reynoldsm, Michael Szmuk .et al. Discretization Performance and Accuracy Analysis for the Rocket Powered Descent Guidance Problem [C] AIAA Scitech 2019 Forum, https://arc.aiaa.org/doi/abs/10.2514/6.2019-0925.

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)