监督学习方法总结
1. 适用问题监督学习:学习一个模型,使它能对给定的输入预测相应的输出。包括分类、标注、回归。分类问题:从实例的 特征向量 到 类标记 的预测问题标注问题:从 观测序列 到 标记序列(或状态序列) 的预测问题。感知机、k近邻法、朴素贝叶斯法、决策树 是简单的分类方法,具有模型直观、方法简单、实现容易等特点逻辑斯谛回归、最大熵模型、支持向量机、提升方法 是更复杂但更有效的分类方法,往...
1. 适用问题
监督学习:学习一个模型,使它能对给定的输入预测相应的输出。包括分类、标注、回归。
- 分类问题:从实例的 特征向量 到 类标记 的预测问题
- 标注问题:从 观测序列 到 标记序列(或状态序列) 的预测问题。
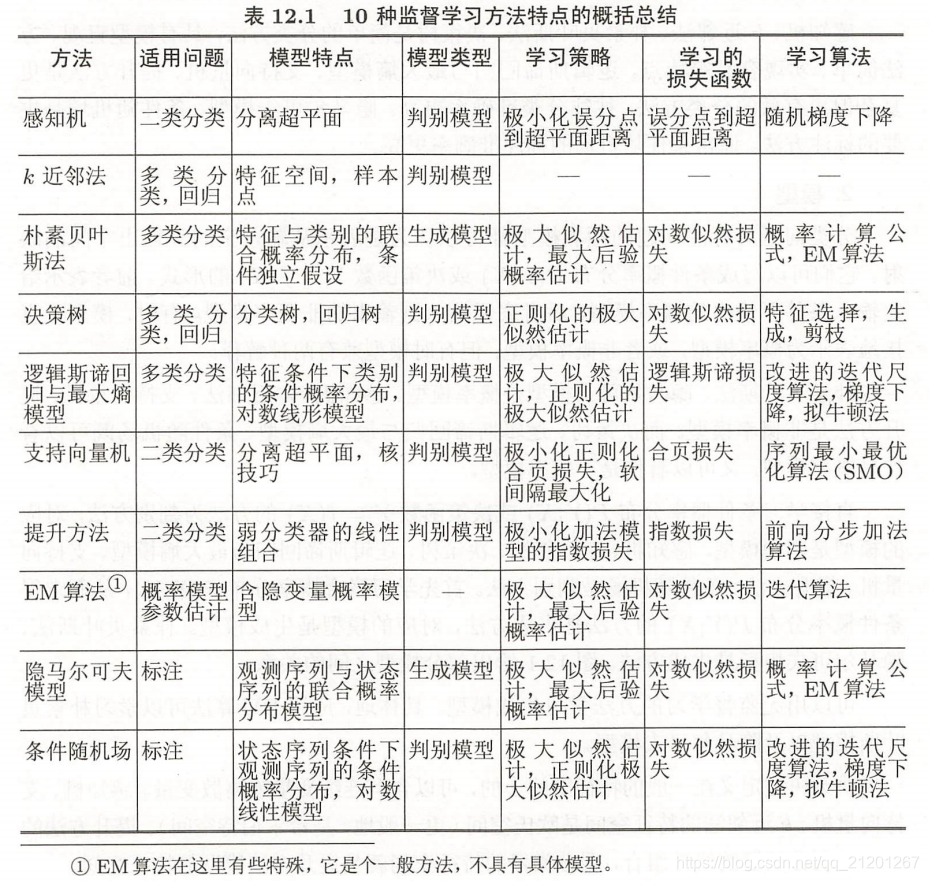
感知机、k近邻法、朴素贝叶斯法、决策树 是简单的分类方法,具有模型直观、方法简单、实现容易等特点
逻辑斯谛回归、最大熵模型、支持向量机、提升方法 是更复杂但更有效的分类方法,往往分类准确率更高
隐马尔可夫模型、条件随机场是主要的标注方法。通常 条件随机场 的标注准确率更高
2. 模型
2.1 概率模型、非概率模型
预测模型 可以写成 条件概率分布 P ( Y ∣ X ) P(Y|X) P(Y∣X) 或 决策函数 Y = f ( X ) Y=f(X) Y=f(X) 的形式。
朴素贝叶斯法、隐马尔可夫模型是概率模型感知机、k近邻法、支持向量机、提升方法是非概率模型决策树、逻辑斯谛回归、最大熵模型、条件随机场既可以看作是概率模型,又可以看作是非概率模型
2.2 判别方法、生成方法
直接学习 条件概率分布 P ( Y ∣ X ) P(Y|X) P(Y∣X) 或 决策函数 Y = f ( X ) Y=f(X) Y=f(X) 的方法为判别方法
- 对应的模型是判别模型:
感知机、k近邻法、决策树、逻辑斯谛回归、最大熵模型、支持向量机、提升方法、条件随机场
首先学习 联合概率分布 P ( X , Y ) P(X,Y) P(X,Y),从而求得 条件概率分布 P ( Y ∣ X ) P(Y|X) P(Y∣X) 的方法是生成方法
- 对应的模型是生成模型:
朴素贝叶斯法、隐马尔可夫模型
2.3 特征空间
决策树是定义在一般特征空间上的,可以含有 连续变量 或 离散变量
感知机、支持向量机、k近邻法 的特征空间是欧氏空间(一般地,希尔伯特空间)
提升方法 的模型是 弱分类器 的线性组合,弱分类器 的 特征空间 就是提升方法模型的特征空间
2.4 线性、非线性模型
感知机模型 是 线性模型
逻辑斯谛回归、最大熵模型、条件随机场 是对数线性模型
k近邻法、决策树、支持向量机(包含核函数)、提升方法 是非线性模型
3. 学习策略
在二类分类的监督学习中,支持向量机、逻辑斯谛回归&最大熵模型、提升方法
各自使用 合页损失函数、逻辑斯谛损失函数、指数损失函数,分别写为:
[ 1 − y f ( x ) ] + [1-y f(x)]_{+} [1−yf(x)]+
log [ 1 + exp ( − y f ( x ) ) ] \log [1+\exp (-y f(x))] log[1+exp(−yf(x))]
exp ( − y f ( x ) ) \exp (-y f(x)) exp(−yf(x))
这3种损失函数都是0-1损失函数的上界,具有相似的形状
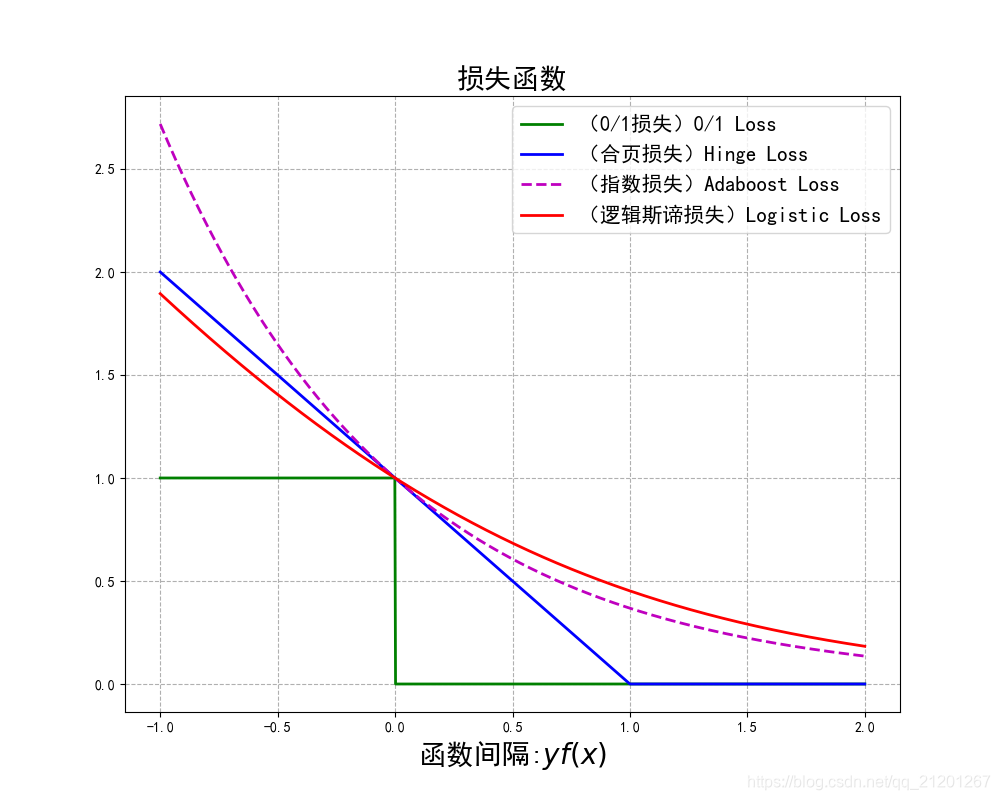
可以认为 支持向量机、逻辑斯谛回归&最大熵模型、提升方法 使用不同的代理损失函数(surrogateloas Punotion)表示分类的损失,定义 经验风险 或 结构风险函数,实现二类分类学习任务。
学习的策略 是优化结构风险函数:
min f ∈ H 1 N ∑ i = 1 N L ( y i , f ( x i ) ) + λ J ( f ) \min _{f \in H} \frac{1}{N} \sum_{i=1}^{N} L\left(y_{i}, f\left(x_{i}\right)\right)+\lambda J(f) f∈HminN1i=1∑NL(yi,f(xi))+λJ(f)
第1项为 经验风险(经验损失),第2项为正则化项, L ( y , f ( x ) ) L(y,f(x)) L(y,f(x)) 为损失函数, J ( f ) J(f) J(f) 为模型的复杂度, λ ≥ 0 \lambda \geq 0 λ≥0为系数。
- 支持向量机 用 L 2 L_2 L2 范数表示模型的复杂度
- 原始的 逻辑斯谛回归 与 最大熵模型 没有正则化项,可以给它们加上 L 2 L_2 L2 范数正则化项
- 提升方法 没有显式的正则化项,通过早停止(early stopping)的方法达到正则化的效果
概率模型 的学习 可以形式化为 极大似然估计 或 贝叶斯估计的 极大后验概率估计
学习的策略是 极小化对数似然损失 或 极小化正则化的对数似然损失
对数似然损失可以写成: − log P ( y ∣ x ) -\log P(y|x) −logP(y∣x)
极大后验概率估计时,正则化项是先验概率的负对数
决策树 学习的策略是正则化的极大似然估计,损失函数是对数似然损失,正则化项是决策树的复杂度
逻辑斯谛回归&最大熵模型、条件随机场 的学习策略既可以看成是 极大似然估计(或正则化的极大似然估计),又可以看成是 极小化逻辑斯谛损失(或正则化的逻辑斯谛损失)
朴素贝叶斯模型、隐马尔可夫模型 的非监督学习也是 极大似然估计 或 极大后验概率估计,但这时模型含有隐变量
4. 学习算法
统计学习的问题有了具体的形式以后,就变成了最优化问题
-
朴素贝叶斯法、隐马尔可夫模型 的监督学习,最优解即极大似然估计值,可以由概率计算公式直接计算。
-
感知机、逻辑斯谛回归 & 最大熵模型、条件随机场 的学习利用梯度下降法、拟牛顿法等一般的无约束最优化问题的解法
-
支持向量机 学习,可以解凸二次规划的对偶问题。有 序列最小最优化 算法等方法
-
决策树 学习是基于启发式算法的典型例子。可以认为特征选择、生成、剪枝是启发式地进行正则化的极大似然估计。
-
提升方法 利用学习的模型是加法模型、损失函数是指数损失函数的特点,启发式地从前向后逐步学习模型,以达到逼近优化目标函数的目的
-
EM算法 是一种迭代的求解含隐变量概率模型参数的方法,它的收敛性可以保证,但不能保证收敛到全局最优
-
支持向量机、逻辑斯谛回归 & 最大熵模型、条件随机场 学习是凸优化问题,全局最优解保证存在。而其他学习问题则不是凸优化问题

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 30
30 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)