Pure Pursuit trajectory tracking and Stanley trajectory tracking总结与比较
Summary of Pure Pursuit trajactory tracking and Stanley trajactory trackingGeometric Vehicle Model这里使用阿克曼转向系,车辆模型简化为自行车模型。pure persuit and Stanley均使用了车辆运动学进行车辆横向控制,忽略车辆动力学的考虑,在未知车辆参数的情况下可以被迫使用。 200...
Summary of Pure Pursuit trajactory tracking and Stanley trajactory tracking
Geometric Vehicle Model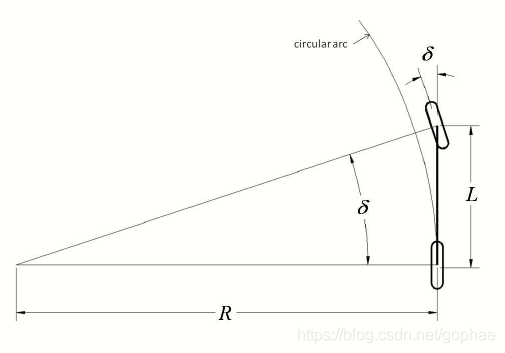
这里使用阿克曼转向系,车辆模型简化为自行车模型。pure persuit and Stanley均使用了车辆运动学进行车辆横向控制,忽略车辆动力学的考虑,在未知车辆参数的情况下可以被迫使用。 2007DARPA 以后,使用较少。
此处可见,四轮车辆被简化为了二轮车辆,另外一个简化为,车辆仅可以在二维平面运动。由于简化,车辆的转向角和轴距和转弯半径遵循以下关系: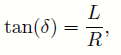
Pure Pursuit
如上,pure pursuit 需要给出预瞄距离Ld, 因此后期当工作效果不好的时候可以对这个预瞄距离进行tuning,但是过程繁琐,在某些情况下使用该模型效果不佳。
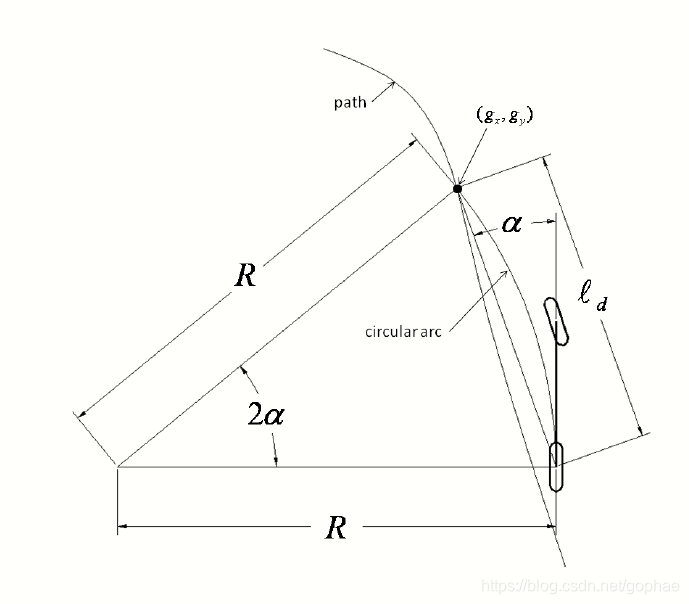
给定预瞄距离后在预定轨迹上获得采样点g, 本车的后轴中心,采样点g, 以及车辆的运动学半径中心行程三角形,根据sin正弦函数三角公式,获得如下:
也可以写成关于曲率半径k的关系:
根据上面的公式,车辆转角改写为:
以上两式合并写为:
此时,在任何情况下,根据给定的预瞄距离ld, 以及常数L, 以及计算出的alpha(t),就可以实时就算期望车辆转角。
为了更好地理解该式:
定义一个新的变量,e_ld, 为车辆头指向与目标点的矢量的横向距离,于是有:
曲率半径可以被重新写为:
这里的2,/ld^2可以被当成一个纯P 控制的增益,值的注意的是,通常情况下我们选取Ld的原则是与车速成线性关系,当然,这个选择可以根据设计更改,也可以是非线性的。
现在选取线性关系,车辆期望转角写为:
此式即为pure pursuit 的最后表达式,需要使用者tuning的部分就是这里的分母K值。
Stanley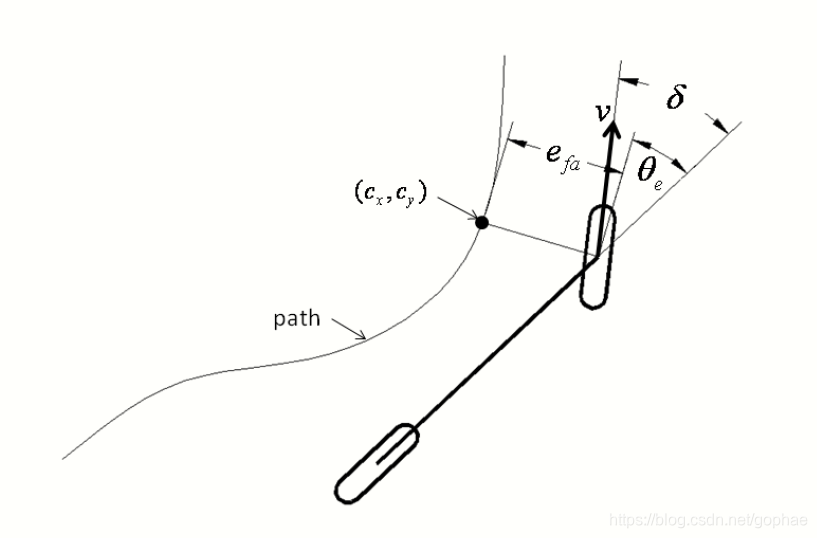
Stanley 考虑到了车辆后轴中心与预定轨迹的横向偏差e_fa, 车辆头指向与预定轨迹heading angle 方向的夹角,stanley车辆期望转角的第一项为
这里,theta为车辆的真实heading angle, theta_p为预定轨迹点的heading angle, 差值就是车辆需要被纠正的heading angle.
如果横向偏差不为零,车辆期望转角会产生第二个控制量,这个控制量和pure pursuit很相似,由前轴中心对应的车辆预定轨迹点C出,往切线防线延伸预瞄距离L, 这里的预瞄距离仍然与车速成正比。于是,两项控制量可合并为: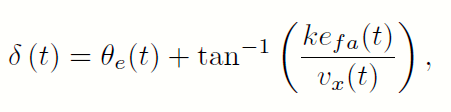
分析
1,pure pursuit预瞄距离系数K越大,跟随效果会越差,随着K减少,效果变好,继续减少,跟随效果会突然变差,最终跟随发散,无法工作。
2,曲率或曲率半径对pure pursuit工作效果影响很大,某个曲率下,给定的pure模型可能工作的很好,在另一个曲率下,工作效果会突然变差,这是因为pure仅仅考虑了curvature,因为对curvature的依赖性就很强。并且这种效果会随着车速的增加越发增强。
3,对于stanley, 比pure好的地方是考虑到了预定点heading angle 和真是的车辆heading angle只差, 作为一个前馈控制,提前补足了在转弯过程中的车辆转角,设计者可以根据需求,对前馈值进一步增加增益系数。同时还推荐使用与速度相关的可变增益系数,可以更好的弥补此类仅考虑车辆运动学,而忽略车辆动力学的模型的不足。增益系数的设定方法可以参考PID系数整定法。

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)