在ROS上实现Seed robotics R8HD机械手与Ur5机械臂的连接与轨迹规划(上)模型连接
在ROS上实现Seed robotics R8HD机械手与Ur5机械臂的连接与轨迹规划(上)模型连接
本部分讲解R8HD的模型与ur5机械臂的连接并在rviz中正常显示
前言:本文运行环境:
Ubuntu 20.04
ROS noetic
工作空间ur_ws
fmauch_universal_robot
ur_robot_driver 部分使用老旧ur_driver的同学文件布局应该会稍有出入
moveit
一、urdf文件以及模型文件的获取
1.前往官方网址的电子手册rh8d:home [Seed Robotics e-Manual]
2.找到官方邮箱 support@seedrobotics.com 3.礼貌一点发送邮件,说明型号,索要urdf文件
3.礼貌一点发送邮件,说明型号,索要urdf文件
4.拿过来的因该是一份urdf文件外加.stl模型文件,将文件拷贝到电脑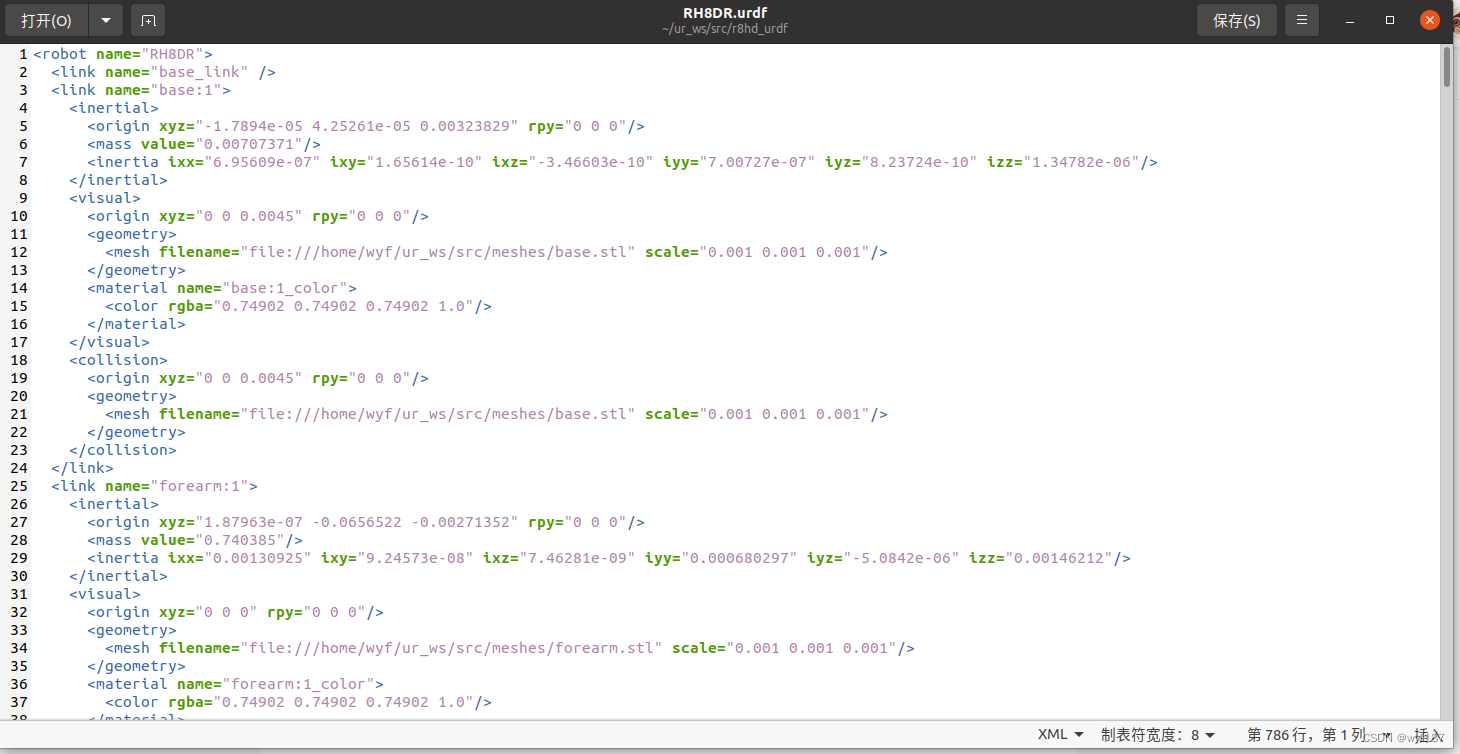
二、建立自己的description功能包
这个功能包同来存放机器人的模型文件
1.在工作空间中新建文件夹ur5withhand
2.
cd ~/ur_ws/ur5withhandcatkin_create_pkg my_description rospy roscpp std_msgs3.前往官方的ur_description 文件夹,把其中根ur5有关的文件都复制到my_description中,换言之,你的my_description中需要包含所有有关ur5的配置文件,以下图片供参考


三、模型文件的修改
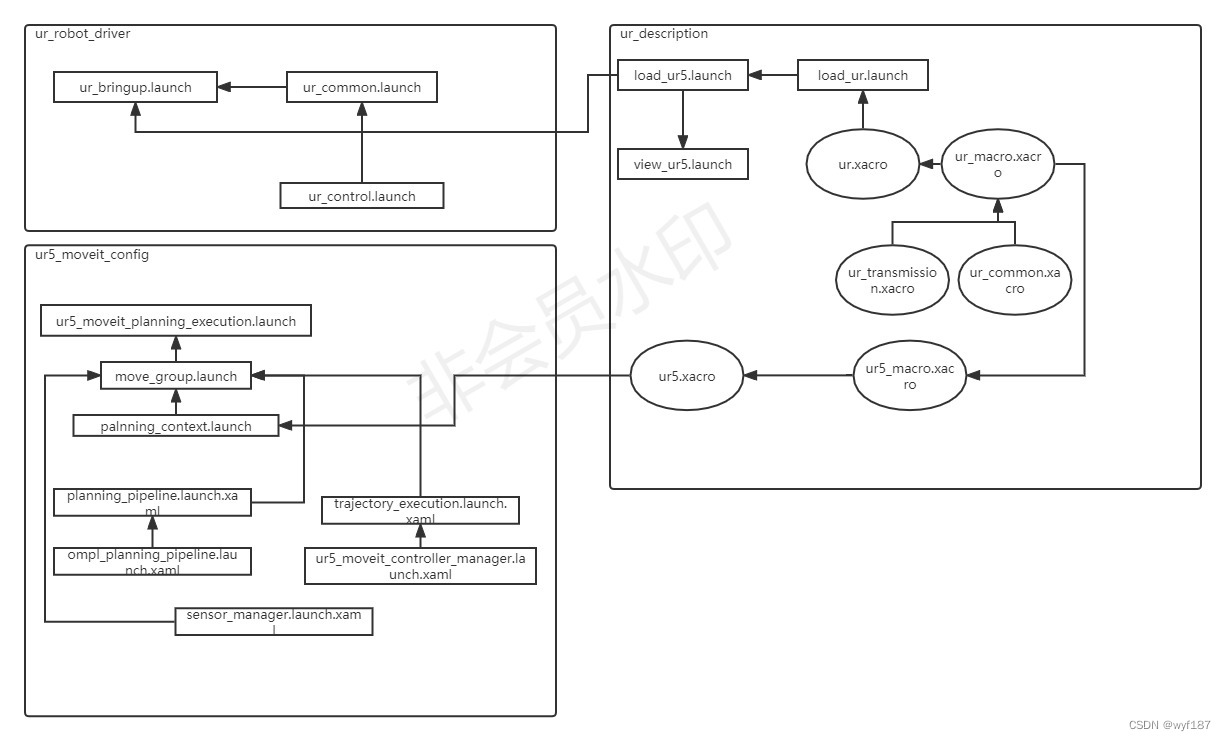
官方文件分为三个package启动rviz显示轨迹并通过moveit规划,其中文件的引用顺序如上图所示,其中箭头指向引用文件,ur_description表示机器人的模型文件,其中所有ur系列的机械臂的关节和实体的相对位置是一样的,都写在ur_marco.xacro当中,load_urX.launch和urX_macro.xacro这类文件通过加载不同的地址的模型文件(位于meshes文件夹中)来表示不同机械臂。
注意:本节操作全部在自己新建的my_description中完成,别不小心把官方文件改了
1. 打开ur_macro.xacro
2.打开 RH8DR.urdf
![]()
3.在RH8DR.urdf中搜索并替换,把所有filename:后面的文件地址改成自己存放.stl文件的地址

4.复制全部 .urdf文件至ur_macro.xacro最后面
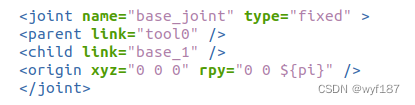
5.本步骤以下在ur_macro.xacro中操作,把.urdf部分开头的base_link关节改为如下,这是由于机械手已经有一个base_link了
![]()
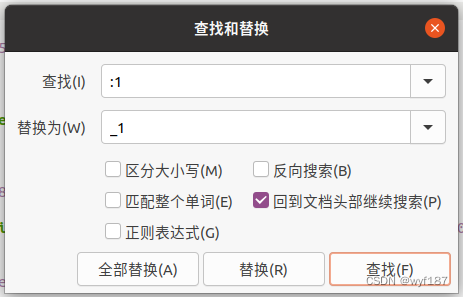
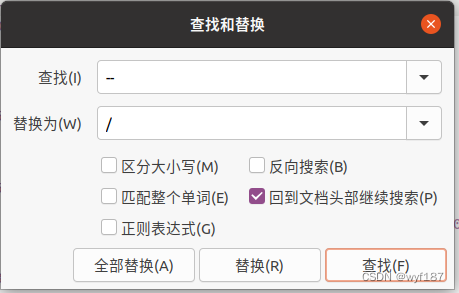
6.搜索和替换.urdf部分内容,共两个,这是由于官方提供的urdf文件中的:和--不符合moveit中的关节命名规则,会导致报错,当然你自己改成自己想改的名字也可以
7.搜索并替换内容,这一步要看清,别把机械臂关节的内容换了,因为本文不打算用ROS控制手爪,手爪打算通过另外的电脑控制,所以把手爪的关节都改成了固定的。

8.别忘了先catkin_make一下
运行
roslaunch my_description view_ur5.launch看看手爪是不是连上去了 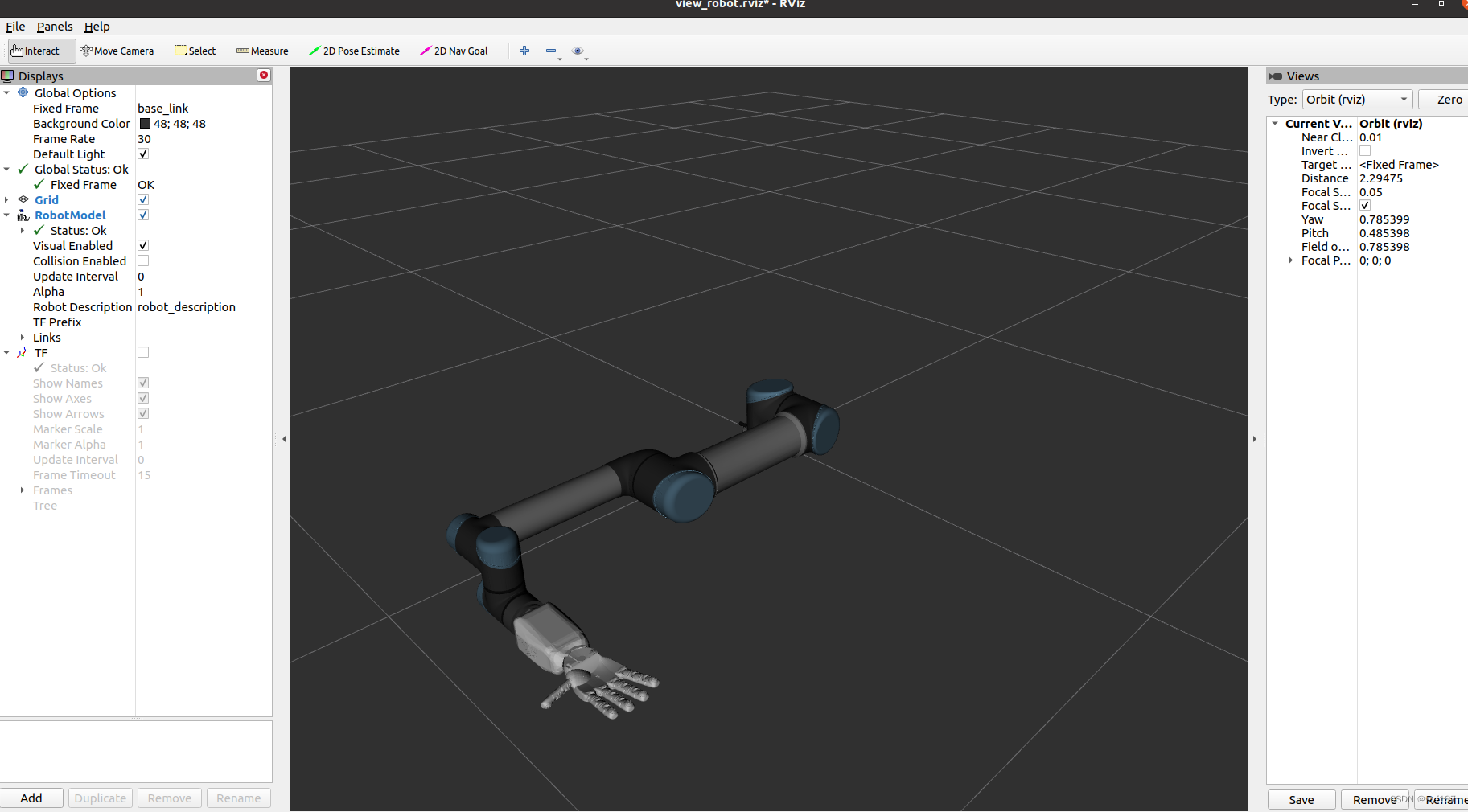
如果安装方向不一致,可以更改base_joint中的rpy的角度
![]()

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐


 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)