几何分布的期望和方差公式推导_卡尔曼滤波系列——经典卡尔曼滤波推导
最近在看一本很不错的计算机视觉基础书籍——《计算机视觉:模型、学习和推理》。个人认为这本书挺适合计算机视觉的初学者,感兴趣的读者可以买一本或者在网上找一本电子版读一读,内容有一定的难度,翻译质量我觉得挺好,不影响理解。之前,在知乎上看到了一个回答,个人觉得说的很有道理,链接如下:计算机视觉(cv)方向今年招聘情况怎么样?是否已经人才过剩?www.zhihu.com里面提到的对“计算机视觉”的成体
最近在看一本很不错的计算机视觉基础书籍——《计算机视觉:模型、学习和推理》。

个人认为这本书挺适合计算机视觉的初学者,感兴趣的读者可以买一本或者在网上找一本电子版读一读,内容有一定的难度,翻译质量我觉得挺好,不影响理解。
之前,在知乎上看到了一个回答,个人觉得说的很有道理,链接如下:
计算机视觉(cv)方向今年招聘情况怎么样?是否已经人才过剩?www.zhihu.com
里面提到的对“计算机视觉”的成体系的认识这一点,一度令我深思,毕竟像我这种半路出家的,对CV缺少系统性地学习,为了能够更好地投身到计算机视觉领域中,而不是蹭热度,个人认为潜心学习CV的基础知识是很有必要的,这能决定一个CVer在这条路上究竟走多远。
话不多说,开始正文
关于卡尔曼滤波这一古老的方法,几乎在很多领域都在发挥着作用,关于它的讲解和推导,也有太多太多的人讲过了,这里只是记录一下我自己的推导方式,因为为了推导这个,我花了一个多小时……感觉不记录下来,都对不起自己~。
在推导之前,先介绍几个必要的知识点:
1、舒尔补恒等式(Schur complement identity)
第一次看到这个公式的时候,我头都要炸了。。。这个公式我们会在后续的从二元联合高斯分布中推导二元条件高斯分布
2、二元条件高斯分布
对于二元变量
上式即两个变量的联合高斯分布表达式,有的时候,我们需要考察二者之间的条件高斯分布,比如:
首先,对于一个高斯分布,其关键部分在于指数函数中的二次项:
将其展开:
其中:
第一项是二次项,中间两项是一次项,注意到这两个一次项是都是标量,因此彼此的转置是相等的(协方差矩阵是对称的),所以可以合并成一项
请注意,协方差矩阵
OK,回到上面的联合分布,我们写出其指数中的二次项:
其中
然后,我们展开就会得到一长串的结果,这里,为了展示的方便,我划分成四行:
现在,我们关心的是:在给定
此时
二次项:
一次项:
好了,均值和方差我们就得到了:
那么,
到此,我们就得到了二元条件高斯分布:
这个公式,在后续推导卡尔曼滤波的时候会用到。
3、卡尔曼滤波
卡尔曼滤波是一个典型的马尔科夫链模型,如下图所示:
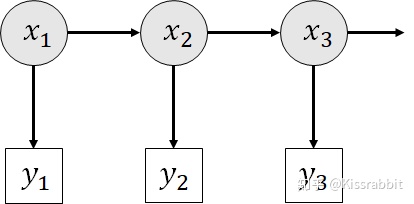
变量
状态转移方程:
观测方程:
其中,
在马尔可夫假设下,该系统有两个性质:
- 当前状态
只与前一时刻
有关:
- 当前观测
只与当前时刻的状态
有关:
我们所要研究的问题就是:在已知时刻
首先,从状态转移方程,我们可以很容易预测出状态
这一步,我们称之为“预测”,因为我们是直接用状态转移方程从时刻
如果我们这个时候获得了观测
为了求出
于是,便得到了具体表达式:
那么,如何求
注意到上面两行有一个相同的因子
我们把上面的公式总结一下:
1.预测:
2.计算卡尔曼增益:
3.校正:
这就是大名鼎鼎的“卡尔曼滤波”。
以上并不是一个很严谨的数学推导,推导思路比较直观,只需要关注我们每一步要得到什么即可,所以还请大家不要太过于较真里面的一些投机取巧的细节,关于用到的两个数学知识点,舒尔补恒等式和条件高斯分布,在很多问题中都能用上,还希望大家能够掌握。更严谨的卡尔曼滤波推导(也就意味着更复杂)大家可以看《计算机视觉:模型、学习和推理》第19章,或者是《机器人学中的状态估计》。

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)