Unity小知识点:unity中的几种坐标转换
一,Unity中的几种坐标系——世界坐标:Unity中创建的场景是一个3D世界,其中坐标为(0,0,0)的位置为世界原点,其他物体相对于这个点的坐标位置为世界坐标(transform.positon是物体相对于世界坐标的位置)——相对坐标:某一个物体相对于其父物体中心的位置(transform.localPosition获得的是相对于父物体坐标的位置,模型Mesh保存的顶点坐标均为相对坐标)——屏
最新消息
本人的小游戏“指尖游戏集”已经上线啦!!!欢迎各位来体验,希望大家多多提意见哦~
微信公众号:unity学习加油站 领取Unity游戏源码,以及各种学习资料~

一,Unity中的几种坐标系

——世界坐标:
Unity中创建的场景是一个3D世界,其中坐标为(0,0,0)的位置为世界原点,其他物体相对于这个点的坐标位置为世界坐标(transform.positon是物体相对于世界坐标的位置)
——相对坐标:
某一个物体相对于其父物体中心的位置(transform.localPosition获得的是相对于父物体坐标的位置,模型Mesh保存的顶点坐标均为相对坐标)
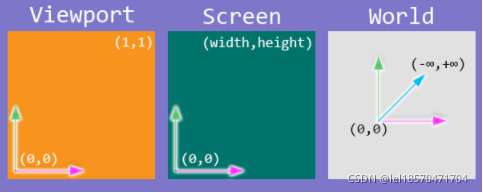
——屏幕坐标:
屏幕坐标是以像素来定义的,与分辨率有关,例如分辨率为1920*1080的屏幕,其Screen.Width=1920,Screen.Height=1080;
屏幕的左下角的坐标为(0,0),右上角的坐标为(Scrren.width,Screen.height),Input.mousePosition和Input.GetTouch(0).position都是获得光标在屏幕坐标中的位置。
——视口坐标:
视口坐标就是将屏幕坐标单位化,屏幕的左下角的坐标为(0,0),左上角的坐标为(1,1)
二:坐标转换
——InverseTransformPoint和TransformPoin
例如物体A的世界坐标坐标为(1,2,3),物体B的世界坐标为(2,2,2),现在需要计算物体B相对于物体A的局部坐标,则应该使用A.transform.InverseTransformPoint(B)
——屏幕坐标转世界坐标
Vector3 mousePos = Input.mousePosition;
Vector3 screenToWorld = Camera.main.ScreenToWorldPoint(new Vector3(mousePos.x, mousePos.y,-Camera.main.transform.position.z));
Debug.Log(screenToWorld);
——世界坐标转屏幕坐标
Vector3 worldToScreen = Camera.main.WorldToScreenPoint(transform.position);
Debug.Log(worldToScreen);
——屏幕坐标转视口坐标
Vector3 mousePos = Input.mousePosition;
Vector3 screenToViewport = Camera.main.ScreenToViewportPoint(mousePos);
Debug.Log(screenToViewport);
——视口坐标转屏幕坐标
Vector3 viewportToScreen = Camera.main.ViewportToScreenPoint(new Vector3(1, 1, 0));
Debug.Log(viewportToScreen);
——世界坐标转视口坐标
Vector3 worldToViewport = Camera.main.WorldToViewportPoint(transform.position);
Debug.Log(worldToViewport);
——视口坐标转世界坐标
Vector3 viewportToWord = Camera.main.ViewportToWorldPoint(new Vector3(1, 1, -Camera.main.transform.position.z));
Debug.Log(viewportToWord);
——屏幕坐标转UI坐标
Vector2 mousePos;
RectTransformUtility.ScreenPointToLocalPointInRectangle(transform.parent.GetComponent<RectTransform>(), Input.mousePosition, null, out mousePos);
Debug.Log(mousePos);
1.Canvas的RenderMode为Overlay时,cam参数应该为NULL。
2.rect必须为直接父物体
任何一个坐标转世界坐标时,z的参数都应该为相机在世界坐标中z的负值
从世界坐标转到任何一个坐标时,计算出的z值都是相机的世界坐标中z轴的负值

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)