[智能体-547]:Hermes Agent:具身智能升级通用自主智能体的核心神器
一、底层核心定位:解决具身智能的天生短板
传统具身机器人(机械臂、移动小车、人形机器人)仅搭载实时运动控制层(ROS2),存在三大致命缺陷:
- 长任务规划能力缺失:只能执行单步运动指令,无法拆解跨小时 / 多天复杂目标(如 “完整完成仓库分拣、自主巡检全流程”);
- 无长期记忆与自进化:单次任务结束即遗忘环境经验、错误操作,重复任务每次从零推理;
- 软件 / 硬件割裂:硬件运动控制、软件文档处理、数据分析、多模态感知分属独立系统,无法形成统一闭环。
Hermes Agent 是上层通用认知调度中枢,依靠原生 MCP 双向协议 + LangGraph 有状态工作流 + 五层持久记忆 + 多智能体集群调度四大核心能力,给具身硬件加装完整 “大脑管理层”,把单纯能动的机器,升级成具备自主规划、持续学习、多岗位协同的完整智能体系统。
硬件与 Hermes 分层分工(行业标准解耦架构)
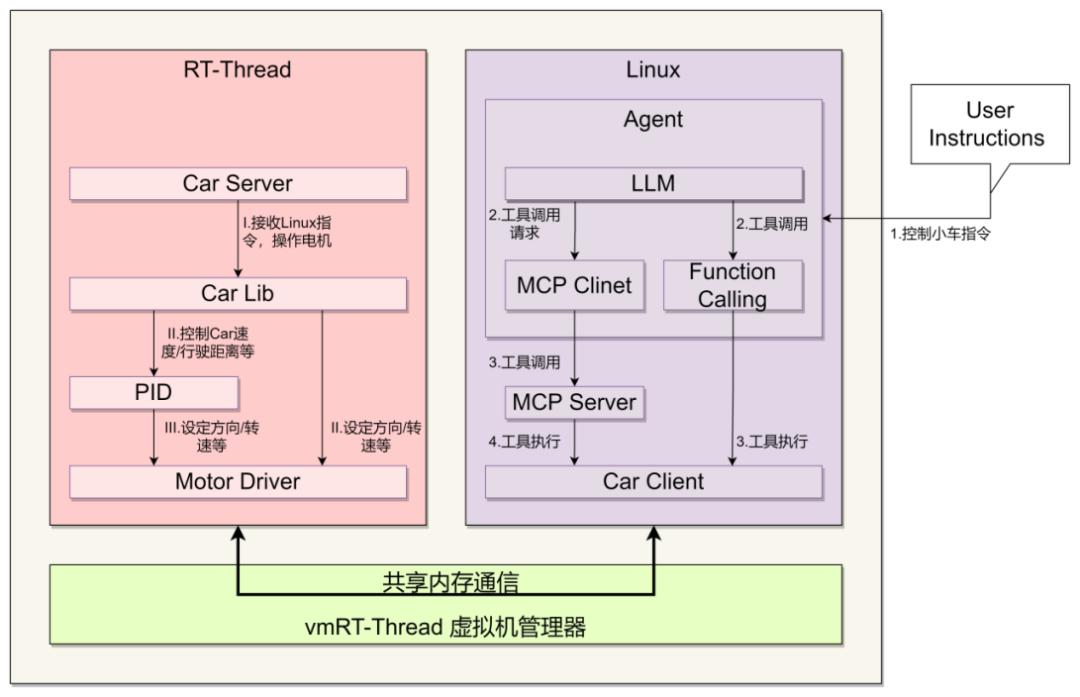
- 底层硬件层(ROS2):机器人底盘、机械臂、视觉相机、电机、传感器,只负责实时运动、硬件闭环控制;
- 中间通信层(MCP 服务):把 ROS2 运动指令、传感器数据封装成标准化 MCP 工具服务,供 Hermes 调用;
- 上层认知层(Hermes Agent):全局总控大脑,负责任务拆解、长期记忆、多智能体协同、复盘进化、跨软硬件流程编排。
一句话分工:ROS2 管 “怎么动”,Hermes 管 “做什么、按什么流程做、做完怎么优化下次效率”。
二、Hermes 改造具身智能的五大核心神器能力
1. 原生 MCP 双向协议:打通具身硬件与 AI 认知的标准化桥梁
MCP 是 AI 世界通用硬件 / 工具总线,Hermes 底层原生支持 MCP 客户端 + 服务端双模式,完美适配机器人 ROS2 封装服务:
- Hermes 作为 MCP 客户端:调用机器人 MCP 服务下发动作指令(导航、抓取、拍照、视觉识别);
- Hermes 作为 MCP 服务端:机器人、嵌入式系统反向调用 Hermes 的记忆库、技能库、大模型推理;
- 统一工具抽象:无需为每种机器人重写适配代码,只需启动机器人侧 MCP 服务,Hermes 自动识别全部硬件能力,自然语言直接操控机械臂、小车。
实操配置示例(Hermes 读取机器人硬件能力)
yaml
# ~/.hermes/config.yaml MCP硬件接入
mcp_servers:
robot_car:
command: "ros2 run mcp_robot_server --port 8005" # ROS2封装MCP服务
vision_camera:
command: "python3 vision_mcp_server.py"
重启 Hermes 后,可直接用自然语言下发硬件任务:
plaintext
@robot_car 自主导航到货架A,用视觉相机扫描货物编号,抓取3号物料放回操作台
2. LangGraph 有状态工作流:赋予具身机器人超长复杂任务规划能力
传统具身硬件只能执行线性单步指令,Hermes 依托 LangGraph StateGraph 构建带分支、循环、断点、返工校验的全局任务流,解决复杂工业场景:
- 自动拆解多级子任务:总目标→导航→视觉识别→抓取→质检→分拣→入库;
- 原生条件分支:视觉识别失败自动触发重新拍照、更换拍摄角度;
- 循环回流校验:物料尺寸不合格,退回抓取工位重新分拣;
- 断点持久化:机器人断电、程序崩溃,重启从当前任务节点继续执行,无需从头跑流程。
具身专属工作流落地两种方式
- Skill 自动沉淀工作流:完整机器人分拣任务跑完后,Hermes 自动复盘流程生成
warehouse_sort.md技能,一键重复整套机器人作业流水线; - Kanban 任务看板异步调度:多台机器人分配独立任务卡片,自动管理任务依赖、优先级,多机器人并行作业互不冲突。
3. Profile 多智能体集群:给单台 / 多台机器人分配专职分工大脑
Hermes 的 Profile 隔离多智能体架构,可实现一台机器人绑定专属认知 Agent、多机器人组成协同军团:
- 单机器人专属智能体
bash
运行
每个机器人 Profile 独立人设、专属记忆、独立模型,只记忆自身作业环境、物料参数、错误操作;# 创建仓储机械臂专属认知大脑 hermes profile create arm_sorter hermes setup --profile arm_sorter - 多机器人协同军团
car_nav移动导航小车 Agent:负责厂区物料转运;arm_pick抓取机械臂 Agent:负责物料分拣;vision_inspect视觉质检 Agent:负责外观缺陷检测;- 顶层超级个体总控 Hermes 统一调度全部硬件智能体,自动分配并行 / 串行任务,多设备协同完成完整产线作业。
4. 五层分层持久本地记忆:让具身机器人拥有 “长期环境经验”
原生五层本地记忆是 Hermes 区别于所有传统机器人控制器的核心优势:
- 基础人设记忆:机器人固定作业规范、安全约束、禁止操作清单,永久加载;
- 事件任务记忆:每次分拣、巡检完整流程记录,记录物料位置、故障点位;
- 向量环境记忆:仓库地图、物料特征、故障图片向量化存储,自主识别历史问题;
- 用户业务记忆:工厂排班、物料订单、客户需求长期留存;
- 技能程序性记忆:自动沉淀最优作业流程,下次同类任务自动选用最优路径。
落地价值:机器人不会 “失忆”,多次作业后自动熟悉厂区环境、规避重复故障,越用作业效率越高。
5. 闭环自进化 GEPA 循环:实现具身机器人自主迭代优化
Hermes 自研 GEPA 自进化闭环,硬件完成作业后自动复盘优化机器人作业逻辑:
- Goal 目标锚定:锁定本次机器人作业核心指标(分拣准确率、耗时、故障率);
- Plan 规划执行:调度 ROS2 硬件完成全流程动作;
- Action 硬件执行:MCP 下发运动指令,采集传感器、视觉反馈数据;
- Evaluation 复盘优化:自动分析抓取失败、导航碰撞、识别误差,修改技能流程、调整运动参数。
完整闭环跑完,自动优化机器人作业流程,无需人工重新编写控制逻辑,实现硬件自主进化。
三、两种落地架构:单机器人升级 / 多机器人产线协同
架构 1:单台具身机器人改造(小型工作站、机械臂、巡检小车)
- 硬件:机械臂 / 巡检小车 + ROS2 底层控制 + MCP 硬件服务;
- 认知层:1 个 Hermes Profile 专属 Agent;
- 交互:本地 TUI / 微信 / 飞书远程下发自然语言指令;
- 能力:自主规划单次完整作业、记忆环境、自动优化抓取路径。 适用场景:桌面机械臂、实验室自主小车、单人巡检机器人。
架构 2:多机器人产线协同军团(工厂仓储、自动化产线)
- 顶层:超级个体总控 Hermes(全局调度大脑);
- 下层:多个 Profile 独立 Agent,分别绑定导航小车、抓取机械臂、视觉检测机器人;
- 通信:MCP 跨 Profile 互通,多硬件并行作业、任务自动流转;
- 调度:Kanban 看板管理全产线任务,定时 Cron 自动启动每日分拣、巡检流水线。 适用场景:智能仓储、柔性产线、多机器人园区巡检。
四、对比 Dify/Coze,为什么 Hermes 是具身智能最优升级神器
表格
| 平台 | MCP 硬件原生支持 | 本地长期记忆 | 多智能体硬件隔离 | 自进化闭环 | 底层 LangGraph 循环 | 私有化本地部署 |
|---|---|---|---|---|---|---|
| Hermes Agent | ✅ 原生双向 MCP,完美对接 ROS2 硬件 | ✅ 五层持久本地记忆 | ✅ Profile 硬件专属隔离智能体 | ✅ GEPA 自动复盘优化 | ✅ 底层核心调度引擎 | ✅ 100% 本地数据不上云 |
| Coze | ❌ MCP 为付费增值功能,云端托管数据 | ❌ 仅短期会话记忆 | ✅ 可视化多 Agent,但数据存字节云端 | ❌ 无自动技能复盘 | ❌ 自研流程引擎,无 LangGraph | ❌ 云端为主,私有化高价阉割 |
| Dify | ⚠️ MCP 需手动开发插件适配 | ⚠️ 仅文档 RAG,无任务流程记忆 | ❌ 无原生独立多 Agent,仅模拟流程 | ❌ 无自进化闭环 | ❌ 不集成 LangGraph 循环 | ✅ 可私有化,但硬件适配成本极高 |
核心优势总结(具身场景独有)
- 完全本地私有化:机器人传感器数据、厂区地图、生产物料信息全部存储本地 VPS / 工控机,不上第三方云端,满足工业数据安全合规;
- 软硬件原生解耦:MCP 标准化硬件适配,任意 ROS2 机器人均可快速接入,无需大规模二次开发;
- 自主进化降低运维成本:传统机器人需要工程师反复修改控制脚本,Hermes 自动复盘优化作业流程;
- 多硬件集群天然适配:Profile 机制轻松实现多机器人分工协同,构建完整自动化产线智能体军团;
- 远程多端调度:手机微信 / 飞书远程下发机器人作业指令,7×24 小时后台无人值守运行。
五、完整实操落地流程(机械臂分拣机器人升级案例)
- 硬件层改造:给 ROS2 机械臂开发 MCP 服务,封装抓取、拍照、移动、质检工具;
- 创建专属具身智能体
bash
运行
hermes profile create warehouse_arm hermes setup --profile warehouse_arm - 写入机器人专属约束记忆:编辑
MEMORY.md,限定安全抓取范围、物料参数、故障处置规范; - MCP 硬件服务接入 Hermes 配置,重启加载硬件能力;
- 下发完整复杂产线任务流
每日早 8 点自动启动分拣流水线:导航至货架→视觉扫描物料→抓取分拣→质检次品放入回收箱→完成后生成分拣报表推送到飞书,若抓取失败自动重试 2 次;
- 任务执行完毕,Hermes 自动沉淀分拣 Skill,次日一键复用整套机器人作业流程;
- 长期持续复盘抓取误差、导航碰撞,自主优化运动路径与作业顺序。
六、一句话总结
Hermes Agent 凭借原生 MCP 硬件互通、LangGraph 长任务工作流、Profile 多智能体集群、五层本地持久记忆、GEPA 自进化闭环五大独有能力,完美补齐传统具身机器人 “无全局规划、无长期经验、软硬件割裂、无法自主优化” 的短板,是把硬件机器人升级为具备完整自主认知能力通用智能体的轻量化开源神器。

欢迎加入 MCP 技术社区!与志同道合者携手前行,一同解锁 MCP 技术的无限可能!
更多推荐

 7
7 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)